Roboticists around the world have been working tirelessly to create robotic grippers that are capable of picking up and manipulating various objects. The most successful grippers are often those that take inspiration from the dexterity of the human hand. However, many of these humanoid robotic hands are complex, expensive, and difficult to program, which limits their practicality in creating energy-efficient and cost-effective robots.
Recently, researchers from Purdue University and MIT collaborated to develop a new robotic gripper that is both simple and highly effective. This gripper, with only 5 degrees of freedom (DOF), was able to successfully tackle intricate object manipulation tasks, surpassing the capabilities of grippers with more complex mechanisms. The team aimed to bridge the gap between high DOF dexterous robotic hands and single DOF grippers, creating a solution that combines ease of programming with advanced manipulation abilities.
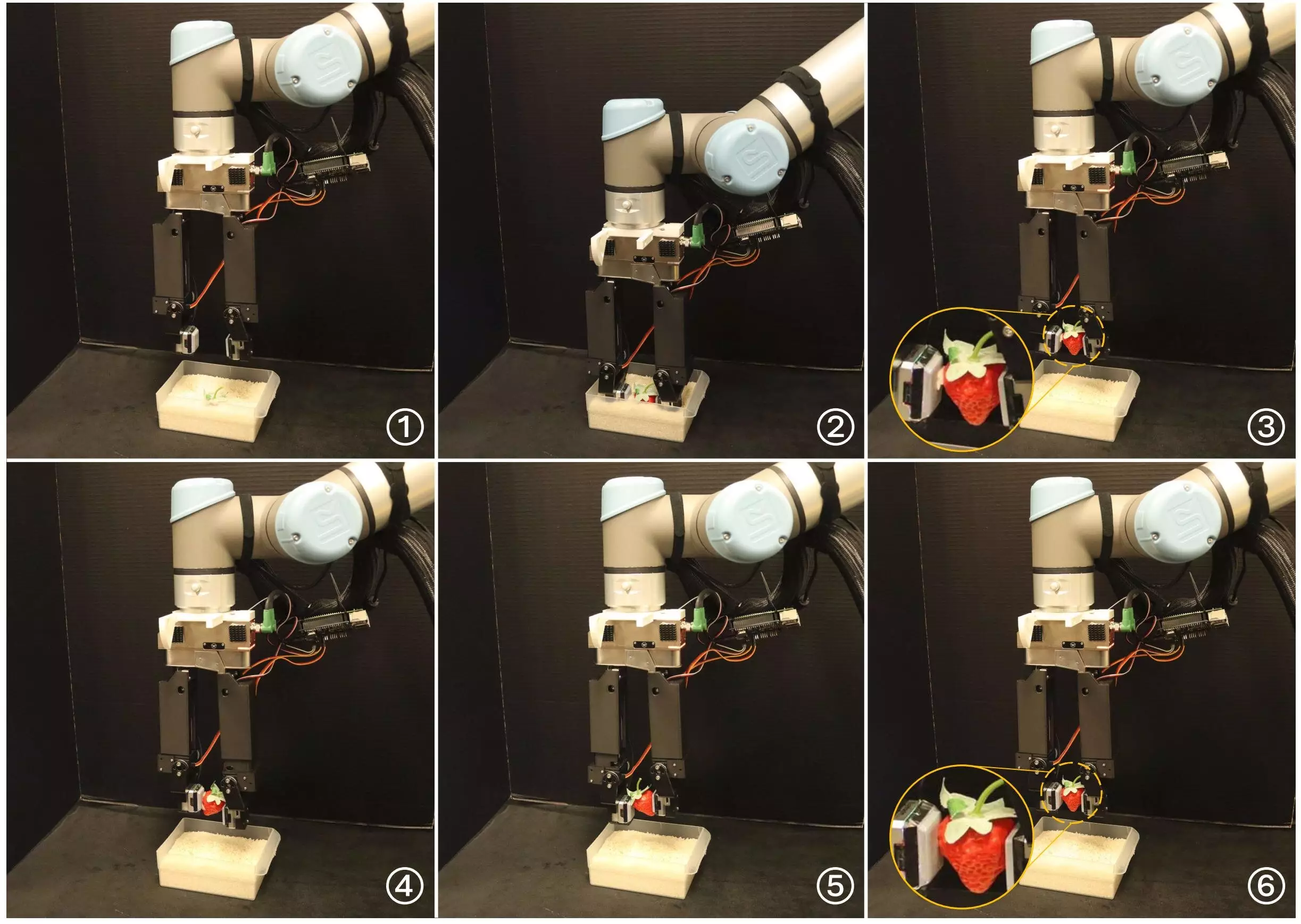
The newly designed gripper consists of two fingers attached to a gripper base, with each finger equipped with a linear actuator and a rotational servo motor. The gripper’s design allows for easy control through programming tools while still enabling human-like in-hand manipulations. Additionally, the integration of a vision-based tactile sensor at the gripper’s left fingertip provides crucial data on object geometry, orientation, and grip force.
Despite having fewer degrees of freedom than traditional humanoid robotic hands, the gripper developed by She and his team demonstrated a high level of dexterity during in-hand manipulation tasks. In initial real-world experiments, the gripper successfully completed tasks such as singulation and scooping, showcasing its advanced capabilities. This reduction in complexity not only simplifies controller design but also leads to more robust, cost-effective, and energy-efficient robotic solutions.
The innovative robotic gripper introduced by the research team has the potential to revolutionize the field of robotic object manipulation. Its simplified yet effective design could pave the way for the development of similar systems that are both affordable and efficient. With plans to tackle even more challenging manipulation tasks in the future, this gripper could set a new standard for robotic gripper technology.
Leave a Reply